Within an epicyclic or planetary gear train, several spur gears distributed evenly around the circumference manage between a gear with internal teeth and a gear with exterior teeth on a concentric orbit. The circulation of the spur gear takes place in analogy to the orbiting of the planets in the solar system. This is how planetary gears acquired their name.
The components of a planetary gear train can be divided into four main constituents.
The housing with integrated internal teeth is actually a ring gear. In the majority of cases the housing is fixed. The traveling sun pinion is usually in the center of the ring gear, and is coaxially organized in relation to the output. Sunlight pinion is usually mounted on a clamping system in order to provide the mechanical link with the engine shaft. During operation, the planetary gears, which will be installed on a planetary carrier, roll between the sun pinion and the ring gear. The planetary carrier likewise represents the outcome shaft of the gearbox.
The sole reason for the planetary gears is to transfer the mandatory torque. The quantity of teeth has no effect on the transmitting ratio of the gearbox. The number of planets may also vary. As the number of planetary gears raises, the distribution of the load increases and therefore the torque that can be transmitted. Raising the amount of tooth engagements as well reduces the rolling vitality. Since only the main total output needs to be transmitted as rolling electric power, a planetary equipment is incredibly efficient. The good thing about a planetary gear compared to a single spur gear is based on this load distribution. Hence, it is possible to transmit excessive torques wit
h high efficiency with a concise design using planetary gears.
Provided that the ring gear has a regular size, different ratios could be realized by different the amount of teeth of sunlight gear and the number of teeth of the planetary gears. The smaller the sun equipment, the greater the ratio. Technically, a meaningful ratio range for a planetary stage is approx. 3:1 to 10:1, because the planetary gears and sunlight gear are extremely little above and below these ratios. Bigger ratios can be obtained by connecting several planetary levels in series in the same band gear. In this instance, we talk about multi-stage gearboxes.
With planetary gearboxes the speeds and torques could be overlaid by having a ring gear that’s not set but is driven in virtually any direction of rotation. Additionally it is possible to fix the drive shaft in order to grab the torque via the ring gear. Planetary gearboxes have grown to be extremely important in many regions of mechanical engineering.
They have become particularly well established in areas where high output levels and fast speeds should be transmitted with favorable mass inertia ratio adaptation. Excessive transmission ratios may also easily be achieved with planetary gearboxes. Because of the positive properties and small design, the gearboxes have a large number of potential uses in industrial applications.
The advantages of planetary gearboxes:
Coaxial arrangement of input shaft and output shaft
Load distribution to several planetary gears
High efficiency due to low rolling power
Nearly unlimited transmission ratio options because of combination of several planet stages
Suitable as planetary switching gear due to fixing this or that area of the gearbox
Possibility of use as overriding gearbox
Favorable volume output
Suitability for a broad range of applications
Epicyclic gearbox is an automatic type gearbox where parallel shafts and gears arrangement from manual gear package are replaced with more compact and more reliable sun and planetary kind of gears arrangement plus the manual clutch from manual vitality train is substituted with hydro coupled clutch or torque convertor which made the tranny automatic.
The thought of epicyclic gear box is extracted from the solar system which is considered to the perfect arrangement of objects.
The epicyclic gearbox usually comes with the P N R D S (Parking, Neutral, Reverse, Travel, Sport) settings which is obtained by fixing of sun and planetary gears in line with the need of the travel.
Components of Epicyclic Gearbox
1. Ring gear- This is a type of gear which looks like a ring and also have angular lower teethes at its inner surface ,and is put in outermost posture in en epicyclic gearbox, the inner teethes of ring gear is in regular mesh at outer level with the group of planetary gears ,it is also referred to as annular ring.
2. Sun gear- It is the gear with angular trim teethes and is put in the center of the epicyclic gearbox; sunlight gear is in regular mesh at inner point with the planetary gears and is certainly connected with the source shaft of the epicyclic equipment box.
One or more sun gears can be used for reaching different output.
3. Planet gears- They are small gears used in between ring and sun gear , the teethes of the planet gears are in regular mesh with the sun and the ring gear at both the inner and outer details respectively.
The axis of the earth gears are mounted on the planet carrier which is carrying the output shaft of the epicyclic gearbox.
The planet gears can rotate about their axis and in addition can revolve between the ring and the sun gear exactly like our solar system.
4. Planet carrier- It is a carrier attached with the axis of the planet gears and is responsible for final transmission of the result to the outcome shaft.
The earth gears rotate over the carrier and the revolution of the planetary gears causes rotation of the carrier.
5. Brake or clutch band- These devices used to repair the annular gear, sunshine gear and planetary equipment and is controlled by the brake or clutch of the vehicle.
Working of Epicyclic Gearbox
The working principle of the epicyclic gearbox is based on the fact the fixing the gears i.electronic. sun equipment, planetary gears and annular gear is done to obtain the required torque or rate output. As fixing any of the above causes the variation in gear ratios from large torque to high quickness. So let’s see how these ratios are obtained
First gear ratio
This provide high torque ratios to the automobile which helps the automobile to move from its initial state and is obtained by fixing the annular gear which in turn causes the earth carrier to rotate with the power supplied to sunlight gear.
Second gear ratio
This provides high speed ratios to the automobile which helps the automobile to realize higher speed throughout a drive, these ratios are obtained by fixing the sun gear which in turn makes the planet carrier the motivated member and annular the traveling member so as to achieve high speed ratios.
Reverse gear ratio
This gear reverses the direction of the output shaft which reverses the direction of the vehicle, this gear is attained by fixing the planet gear carrier which in turn makes the annular gear the powered member and the sun gear the driver member.
Note- More swiftness or torque ratios can be achieved by increasing the number planet and sun equipment in epicyclic gear container.
High-speed epicyclic gears can be built relatively little as the energy is distributed over a couple of meshes. This effects in a low power to weight ratio and, together with lower pitch collection velocity, contributes to improved efficiency. The small gear diameters produce lower moments of inertia, significantly minimizing acceleration and deceleration torque when starting and braking.
The coaxial design permits smaller and therefore more cost-effective foundations, enabling building costs to be kept low or entire generator sets to be integrated in containers.
The reasons why epicyclic gearing is used have been covered in this magazine, so we’ll expand on the topic in only a few places. Let’s begin by examining a significant facet of any project: price. Epicyclic gearing is generally less costly, when tooled properly. Just as one would not consider making a 100-piece lot of gears on an N/C milling equipment with a form cutter or ball end mill, one should not consider making a 100-piece lot of epicyclic carriers on an N/C mill. To continue to keep carriers within realistic manufacturing costs they must be created from castings and tooled on single-purpose equipment with multiple cutters concurrently removing material.
Size is another point. Epicyclic gear units are used because they’re smaller than offset gear sets since the load is shared among the planed gears. This makes them lighter and more compact, versus countershaft gearboxes. Likewise, when configured effectively, epicyclic gear models are more efficient. The next example illustrates these rewards. Let’s believe that we’re designing a high-speed gearbox to fulfill the following requirements:
• A turbine provides 6,000 hp at 16,000 RPM to the source shaft.
• The productivity from the gearbox must drive a generator at 900 RPM.
• The design life is usually to be 10,000 hours.
With these requirements at heart, let’s look at three likely solutions, one involving an individual branch, two-stage helical gear set. A second solution takes the original gear set and splits the two-stage decrease into two branches, and the 3rd calls for utilizing a two-level planetary or celebrity epicyclic. In this instance, we chose the star. Let’s examine each of these in greater detail, seeking at their ratios and resulting weights.
The first solution-a single branch, two-stage helical gear set-has two identical ratios, derived from taking the square root of the final ratio (7.70). In the process of reviewing this option we recognize its size and excess weight is very large. To lessen the weight we after that explore the possibility of making two branches of an identical arrangement, as observed in the second solutions. This cuts tooth loading and minimizes both size and pounds considerably . We finally arrive at our third alternative, which may be the two-stage celebrity epicyclic. With three planets this equipment train decreases tooth loading significantly from the initially approach, and a somewhat smaller amount from answer two (find “methodology” at end, and Figure 6).
The unique design characteristics of epicyclic gears are a huge part of what makes them so useful, however these very characteristics could make creating them a challenge. Within the next sections we’ll explore relative speeds, torque splits, and meshing considerations. Our target is to create it easy for you to understand and use epicyclic gearing’s unique design characteristics.
Relative Speeds
Let’s begin by looking at how relative speeds function in conjunction with different plans. In the star arrangement the carrier is fixed, and the relative speeds of the sun, planet, and band are simply determined by the speed of 1 member and the number of teeth in each equipment.
In a planetary arrangement the ring gear is fixed, and planets orbit the sun while rotating on the planet shaft. In this set up the relative speeds of sunlight and planets are dependant on the quantity of teeth in each equipment and the acceleration of the carrier.
Things get a lttle bit trickier whenever using coupled epicyclic gears, since relative speeds may not be intuitive. It is therefore imperative to constantly calculate the swiftness of sunlight, planet, and ring in accordance with the carrier. Understand that even in a solar set up where the sunlight is fixed it has a speed marriage with the planet-it isn’t zero RPM at the mesh.
Torque Splits
When considering torque splits one assumes the torque to be divided among the planets similarly, but this might not exactly be a valid assumption. Member support and the number of planets determine the torque split represented by an “effective” quantity of planets. This amount in epicyclic sets designed with two or three planets is generally equal to you see, the quantity of planets. When a lot more than three planets are applied, however, the effective amount of planets is often less than some of the number of planets.
Let’s look at torque splits with regards to set support and floating support of the participants. With fixed support, all members are backed in bearings. The centers of sunlight, ring, and carrier will not be coincident due to manufacturing tolerances. Due to this fewer planets happen to be simultaneously in mesh, resulting in a lower effective quantity of planets sharing the load. With floating support, a couple of participants are allowed a small amount of radial independence or float, that allows the sun, ring, and carrier to seek a posture where their centers will be coincident. This float could be as little as .001-.002 inches. With floating support three planets will always be in mesh, resulting in a higher effective amount of planets posting the load.
Multiple Mesh Considerations
At the moment let’s explore the multiple mesh factors that needs to be made when making epicyclic gears. First we must translate RPM into mesh velocities and determine the number of load application cycles per device of time for each and every member. The first step in this determination is definitely to calculate the speeds of each of the members relative to the carrier. For example, if the sun gear is rotating at +1700 RPM and the carrier is rotating at +400 RPM the rate of the sun gear in accordance with the carrier is +1300 RPM, and the speeds of planet and ring gears could be calculated by that swiftness and the numbers of teeth in each of the gears. The usage of signs to stand for clockwise and counter-clockwise rotation is usually important here. If sunlight is rotating at +1700 RPM (clockwise) and the carrier is rotating -400 RPM (counter-clockwise), the relative quickness between the two people is normally +1700-(-400), or +2100 RPM.
The second step is to determine the amount of load application cycles. Since the sun and band gears mesh with multiple planets, the number of load cycles per revolution relative to the carrier will end up being equal to the amount of planets. The planets, on the other hand, will experience only one bi-directional load software per relative revolution. It meshes with the sun and ring, but the load is certainly on opposite sides of the teeth, leading to one fully reversed anxiety cycle. Thus the planet is considered an idler, and the allowable pressure must be reduced thirty percent from the worthiness for a unidirectional load software.
As noted above, the torque on the epicyclic users is divided among the planets. In analyzing the stress and existence of the members we must look at the resultant loading at each mesh. We discover the idea of torque per mesh to be somewhat confusing in epicyclic gear analysis and prefer to look at the tangential load at each mesh. For example, in searching at the tangential load at the sun-planet mesh, we have the torque on sunlight gear and divide it by the effective quantity of planets and the working pitch radius. This tangential load, combined with the peripheral speed, is utilized to compute the energy transmitted at each mesh and, adjusted by the load cycles per revolution, the life expectancy of each component.
Furthermore to these issues there can also be assembly complications that require addressing. For example, inserting one planet ready between 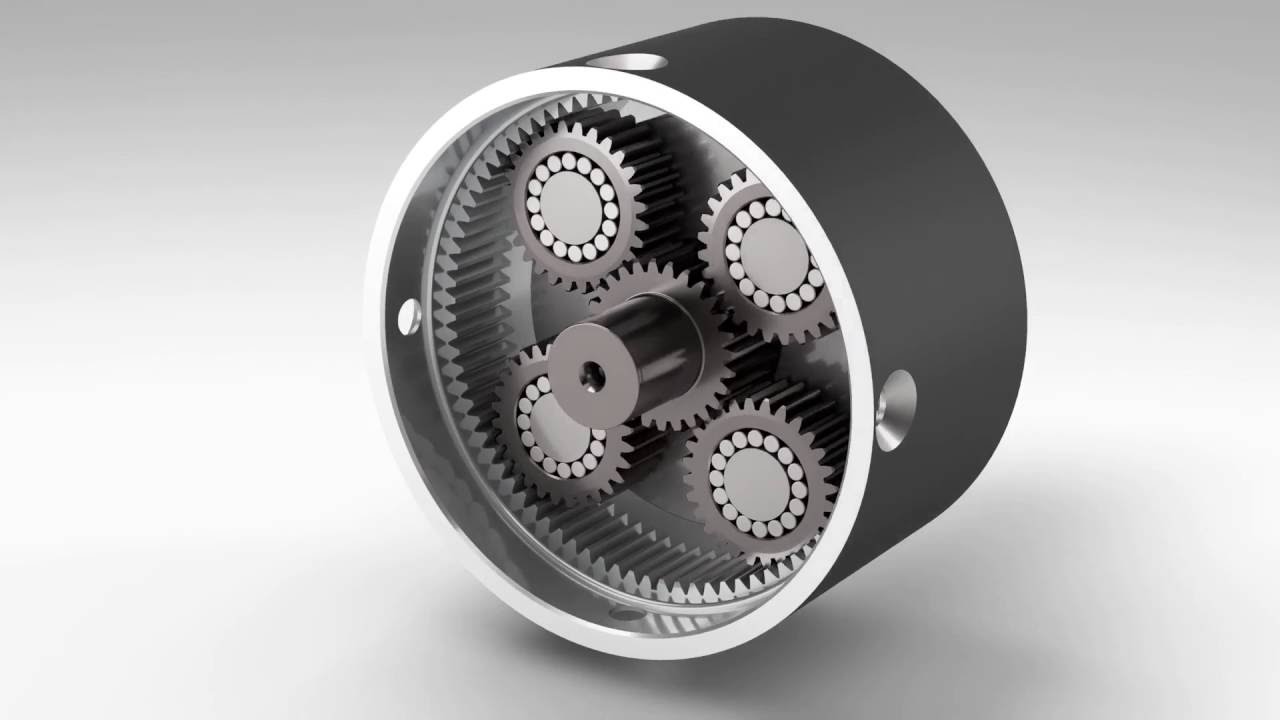 sun and ring fixes the angular job of the sun to the ring. Another planet(s) can now be assembled only in discreet locations where the sun and ring can be at the same time involved. The “least mesh angle” from the initially planet that will support simultaneous mesh of another planet is equal to 360° divided by the sum of the numbers of teeth in the sun and the ring. As a result, so that you can assemble more planets, they must become spaced at multiples of this least mesh position. If one wants to have the same spacing of the planets in a straightforward epicyclic set, planets may be spaced equally when the sum of the number of teeth in sunlight and band can be divisible by the amount of planets to an integer. The same guidelines apply in a compound epicyclic, but the fixed coupling of the planets provides another degree of complexity, and appropriate planet spacing may require match marking of tooth.
sun and ring fixes the angular job of the sun to the ring. Another planet(s) can now be assembled only in discreet locations where the sun and ring can be at the same time involved. The “least mesh angle” from the initially planet that will support simultaneous mesh of another planet is equal to 360° divided by the sum of the numbers of teeth in the sun and the ring. As a result, so that you can assemble more planets, they must become spaced at multiples of this least mesh position. If one wants to have the same spacing of the planets in a straightforward epicyclic set, planets may be spaced equally when the sum of the number of teeth in sunlight and band can be divisible by the amount of planets to an integer. The same guidelines apply in a compound epicyclic, but the fixed coupling of the planets provides another degree of complexity, and appropriate planet spacing may require match marking of tooth.
With multiple elements in mesh, losses must be considered at each mesh so as to measure the efficiency of the unit. Power transmitted at each mesh, not input power, can be used to compute power reduction. For simple epicyclic units, the total vitality transmitted through the sun-world mesh and ring-planet mesh may be significantly less than input vitality. This is among the reasons that easy planetary epicyclic units are more efficient than other reducer plans. In contrast, for many coupled epicyclic units total electricity transmitted internally through each mesh may be higher than input power.
What of electrical power at the mesh? For basic and compound epicyclic pieces, calculate pitch series velocities and tangential loads to compute electricity at each mesh. Values can be acquired from the earth torque relative velocity, and the working pitch diameters with sun and ring. Coupled epicyclic sets present more complex issues. Elements of two epicyclic models can be coupled 36 different ways using one insight, one end result, and one reaction. Some plans split the power, while some recirculate electricity internally. For these types of epicyclic units, tangential loads at each mesh can only be determined through the application of free-body diagrams. On top of that, the factors of two epicyclic pieces could be coupled nine various ways in a string, using one type, one result, and two reactions. Let’s look at some examples.
In the “split-electric power” coupled set displayed in Figure 7, 85 percent of the transmitted vitality flows to band gear #1 and 15 percent to band gear #2. The result is that coupled gear set can be smaller than series coupled models because the ability is split between the two factors. When coupling epicyclic pieces in a series, 0 percent of the power will end up being transmitted through each establish.
Our next case in point depicts a established with “vitality recirculation.” This gear set comes about when torque gets locked in the machine in a way similar to what takes place in a “four-square” test process of vehicle travel axles. With the torque locked in the system, the hp at each mesh within the loop heightens as speed increases. Therefore, this set will experience much higher power losses at each mesh, leading to drastically lower unit efficiency .
Physique 9 depicts a free-body diagram of an epicyclic arrangement that experiences electric power recirculation. A cursory research of this free-body diagram explains the 60 percent efficiency of the recirculating established displayed in Figure 8. Because the planets are rigidly coupled with each other, the summation of forces on both gears must the same zero. The push at sunlight gear mesh outcomes from the torque input to the sun gear. The pressure at the second ring gear mesh results from the outcome torque on the band equipment. The ratio being 41.1:1, end result torque is 41.1 times input torque. Adjusting for a pitch radius big difference of, say, 3:1, the drive on the second planet will be approximately 14 times the pressure on the first planet at sunlight gear mesh. For this reason, for the summation of forces to mean zero, the tangential load at the first ring gear must be approximately 13 times the tangential load at the sun gear. If we assume the pitch line velocities to become the same at the sun mesh and band mesh, the power loss at the band mesh will be roughly 13 times higher than the power loss at sunlight mesh .
epicyclic gearbox
Tags: